



Kategorie Innovation & Technologie - 5. August 2021
Vom Platooning bis zur letzten Meile: Das sind die Leitprojekte zum automatisierten Fahren in Österreich
Mehr Verkehrssicherheit, eine höhere Verkehrseffizienz und einhergehend damit ein Beitrag zur CO2-Reduktion, dazu enorme wirtschaftliche Möglichkeiten: Automatisierte Mobilität birgt nach wie vor große Potentiale. Weltweit wird an der Entwicklung und Einführung entsprechender Technologien – von selbstfahrenden Fahrzeugen, Zügen bis hin zu Drohnen – gearbeitet. Beschleunigt wird diese Entwicklung durch den vermehrten Einzug von Informations- und Kommunikationstechnologien in den traditionellen Fahrzeugsektor. Neue Akteure rücken zunehmend in den Vordergrund – mit teils beachtlichen Fortschritten.


Was uns morgen durch den Alltag begleiten soll, wird auch vom Bundesministerium für Klimaschutz, Umwelt, Energie, Mobilität, Innovation und Technologie (BMK) sorgfältig beobachtet. Es fördert mit vielfältigen Projekten im Bereich automatisierter und vernetzter Fahrzeuge Mobilität in all ihren Facetten. Ein wichtiger Schwerpunkt in Österreich ist daher bereits jetzt das Lernen aus Tests und Pilotprojekten, wie den beiden Leitprojekten Digibus und Connecting Austria, gefördert aus den Mitteln des Förderprogramms Mobilität der Zukunft.
Im Zentrum beider Projekte stand die Frage, welchen Einfluss automatisierte Mobilität sowohl auf den Personen- als auch auf die Gütermobilität hat, zudem, welche Lenkungs- und Steuerungsmechanismen notwendig werden, um automatisierte Mobilität sicher und nachhaltig zu verankern.
Connecting Austria
Um Sicherheit und Effizienz beim automatisierten Transport ging es im österreichischen Leitprojekt Connecting Austria, welches sich das sogenannte Platooning als Schwerpunkt auserkoren hat und Technologieführer und Anwender aus dem öffentlichen und wirtschaftlichen Bereich zusammenführte, um vier österreichspezifische Anwendungsfälle stufenweise zu demonstrieren. Im drei Jahre dauernden und Ende 2020 abgeschlossenen Projekt wurden die verschiedensten Facetten von Lkw-Platoons intensiv durchgespielt.


Beim Platooning fahren mehrere Lastwagen mithilfe technischer Steuerungssysteme in sehr geringem Abstand hintereinander und reduzieren so ihren Kraftstoffverbrauch. Die Rede ist von einer Spriteinsparung von bis zu zehn Prozent.
„Wir sehen uns an, wie der Infrastrukturbetreiber Lkw-Platooning sicherer machen kann“, so Projektleiter Wolfgang Schildorfer. Dieser (im Falle von Connecting Austria die ASFINAG) sendet Informationen an die Fahrzeuge, die dem Fahrer sagen, ob Platooning in einem bestimmten Straßenabschnitt erlaubt ist oder nicht – beispielsweise aufgrund von Regen, Baustellen oder Stau. Letztendlich wird der gesamte Weg eines energieeffizienten Lkw-Platoon vom Versandort über die Autobahn bis zu einem Güterverteilzentrum am Stadtrand untersucht.
Hauptziel des Projekts war eine Bewertungsgrundlage für die Evaluierung der Wirkungen energieeffizienter teilautomatisierter Lkw-Platoons zu schaffen. Damit werden die Voraussetzungen geschaffen, die Wettbewerbsfähigkeit österreichischer Leitindustrien wie Logistik, Telematikinfrastrukturanbieter, Automobilzulieferer, Fahrzeugentwicklung und angeschlossene Forschung zu erhöhen.
Connecting Austria startete im Jänner 2018 mit der Frage, welche Voraussetzungen für einen kooperativen Level 1-Lkw-Platoon nötig sind, um sicher und energieeffizient von A nach B zu kommen. Es wurde untersucht, welche Auswirkungen Lkw-Platoons auf Umwelt, Verkehrssicherheit, Verkehrseffizienz, Autobahnbetreiber und österreichische Logistik-Dienstleister haben. Level 1-Lkw-Platoon bedeutet, dass die Fahrzeuge über eine elektronische Achskopplung das Brems- und Beschleunigungsverhalten aufeinander abstimmen können. Dabei sitzt in jedem Lkw ein:e Lenker:in mit beiden Händen am Lenkrad.
Ein wichtiges Ergebnis aus Connecting Austria ist die Antwort auf die Frage, welches Potential Lkw-Platooning in Hinblick auf die Fahrzeugeffizienz durch Windschatteneffekte hat. Die Abschätzung der Treibstoffersparnis basiert auf CFD-Simulationen, wobei die Simulationsergebnisse mittels Messfahrten am ungarischen Testgelände Zalazone validiert wurden. In einem Platoon aus drei Lkw errechnete das Projektteam eine durchschnittliche Treibstoffeinsparung von knapp 7,5 Prozent bei einem Abstand von 15 Metern zwischen den Lkw und einer Geschwindigkeit von 80 km/h.
Ein europaweit herausragendes Projektergebnis, die Entwicklung einer sogenannten „dynamic risk-rated-map“, zeigt, welche Strecken des österreichischen Autobahnnetzes im Platoon (zwei bis maximal drei Lkw) potentiell befahren werden können. Unter Berücksichtigung von Autobahnauffahrten, -abfahrten, Brücken und Tunnel wurden in sechs unterschiedlichen Szenarien Zonen definiert, in denen Lkw-Platooning erlaubt oder nicht erlaubt werden könnten. Das Management, welches Szenario oder welche Kombination dieser Szenarien auf welchem Streckenabschnitt zur Anwendung kommt, erfolgt unter Anwendung einer dynamischen Verkehrssteuerung. Mittels Day 2-C-ITS-Nachrichten wie zum Beispiel „platooning allowed“, „platooning-not-allowed“, „minimum-distance-gap 25 meters“ können Lkw-Platoons situationsabhängig unterstützt werden. Der Lkw-Lenker:innen entscheiden basierend auf diesen C-ITS Nachrichten wie sie fahren.
Wenn Lkw-Platooning auf Basis eines dynamischen Verkehrsmanagements organisiert wird, ist das mögliche Einsparungspotential (Treibstoff und damit direkt verbunden CO2-Ausstoß) pro gefahrener Strecke und somit auch auf dem gesamten Autobahnnetz durch Lkw-Platooning wesentlich höher. So kann man zum Beispiel durch Entfernen des Parameters „Lkw-Platoon 400 Meter vor allen Autobahnauf- und abfahrten auflösen“ eine Erhöhung der möglichen Strecken auf österreichischen Autobahnen im Lkw-Platoon von 47 auf 69 Prozent erreichen.
Ohne Einbußen an Verkehrssicherheit können so Autobahnbetreiber und Lkw-Flottenbetreiber einen gemeinsamen Beitrag zur Reduktion des CO2-Ausstoßes leisten. Unter Berücksichtigung von Rahmenbedingungen wie Wetterlage und Luftqualität kann dies den entscheidenden Unterschied machen. Das individuelle Potential pro Lkw-Platoon und Fahrt lässt sich auf den gesamten Lkw-Güterverkehr in Österreich hochrechnen. Somit konnte ein maximal mögliches Einsparungspotential durch Lkw-Platooning mittels C-ITS-basiertem dynamischen Verkehrsmanagement gezeigt werden. Eine solche Hochrechnung wurde im Bereich Lkw-Platooning in Österreich noch nie durchgeführt.
Eine weitere Forschungslücke, die im Projekt Connecting Austria identifiziert und anschließend bearbeitet wurde, ist die Frage nach dem Verhalten aller Verkehrsteilnehmenden in Bezug zu Lkw-Platoons. Insbesondere die Herausforderung, mit dem Pkw zwischen einen Lkw-Platoon zu fahren, um beispielsweise eine Autobahnausfahrt nehmen zu können, wurde mit Hilfe einer Gap-Acceptance-Studie bearbeitet.
Während des Projekts haben sich – erwartbar – neue Fragestellungen ergeben. Zum Beispiel, ob ein Lkw-Platoon den Straßenoberbau der ASFINAG überproportional belasten würde. Ein Teil des Projektkonsortiums hat diese Frage im Projekt Spurvariation untersucht, die Ergebnisse dazu bereits via FFG veröffentlicht. Themen zu C-ITS sowie Lkw-Platooning und Kommunikation mit anderen Verkehrsteilnehmer:innen behandelt das nationale Projekt COPE – Collective Perception – seit dem 1. Oktober 2020.
Die Notwendigkeit von Verkehrssimulationen und digitalen Karten als Abbildung der Realität hat sich in vielen Fragen rund um Verkehrseffizienz und –sicherheit gezeigt. Folglich wurde am 1. Oktober das Projekt „DIGEST“ gestartet, das einen Digitalen Zwilling des Verkehrssystems Straße als Fokus hat.
Mögliche Auswirkungen von Lkw-Platooning auf die Nutzung von anderen Verkehrsträgern im Güterverkehr, sogenannte Rebound-Effekte, waren nicht Forschungsgegenstand des Leitprojekts. Die Untersuchung dieser Auswirkungen steht aber ganz oben auf der Forschungsroadmap der Connecting Austria Projektpartner.
Der laufende Austausch mit anderen europäischen Lkw-Platooning Forschungsprojekten in Schweden und in Bayern war für alle anregend und fruchtbar. Einige Schlüsselakteure in Europa haben anerkannt – die Zukunft Europas beginnt unter anderem bei der erfolgreichen und intelligenten Bewältigung von Engpässen im Autobahnnetz von Transitländern wie Österreich. Autobahnbetreibern und Behörden (Luftqualität) kommt dabei eine wichtige Rolle zu. Die Connecting Austria-Ergebnisse zum Thema Lkw-Platooning werden in zwei EU Projekten als Benchmark und Vorleistung eingebracht (Start Dezember 2020 und Jänner 2021). Ergänzend zu den erwähnten Projekten wird Lkw-Platooning im Testfeld zu automatisiertem Fahren – „DigiTrans“ – eine wesentliche Rolle spielen.
Digibus Austria
Im österreichischen Leitprojekt Digibus® Austria wurde in den vergangen drei Jahren am zuverlässigen und verkehrssicheren Betrieb von automatisierten Fahrzeugen geforscht. Insgesamt 13 Organisationen aus Forschung und Wirtschaft erarbeiteten gemeinsam Methoden, Technologien und Modelle für einen Einsatz im regionalen Personennahverkehr. Neben zahlreichen technischen Fortschritten steht als ein Ergebnis des Leitprojekts nun ein detailliertes Vorgehensmodell zur Verfügung, das potenzielle Betreiber Schritt für Schritt von der Planung bis zum Betrieb von selbstfahrenden Shuttles führt.

Digibus® auf der Teststrecke in Koppl, © Salzburg Research / wildbild
Die Überbrückung der sogenannte ersten bzw. letzten Meile stellt eine große Herausforderung in der Nutzung von öffentlichen Nahverkehrsangeboten dar: Wer mehr als diese Meile – also etwa 1,5 km – von der nächsten Haltestelle oder vom Bahnhof entfernt wohnt oder arbeitet, nutzt eher das eigene Auto und nicht den Bus oder die Bahn. „Automatisierte Fahrzeuge wie der Digibus® könnten in diesem Jahrzehnt zum Game-Changer werden, indem sie die erste bzw. letzte Meile fahrerlos überbrücken und damit insbesondere im ländlichen Raum eine wichtige Zubringerfunktion zu Bahn- oder Buslinien übernehmen“, sagt der Leiter des österreichischen Leitprojektes Digibus® Austria, Karl Rehrl von Salzburg Research.
Um dieser Vision einen Schritt näher zu kommen, wurde im Leitprojekt Digibus® Austria drei Jahre lang intensiv geforscht und getestet. Damit automatisierte Shuttles auf öffentlichen Straßen eingesetzt werden können, muss eine Vielzahl von Technologien und Rahmenbedingungen zusammenspielen. Ein Vorgehensmodell gibt potenziellen Betreiber/-innen nun detaillierte Anhaltspunkte: „Das Vorgehensmodell führt durch alle nötigen Schritte, um einen sicheren und zuverlässigen Betrieb von automatisierten Shuttles zu planen und durchzuführen – von der Machbarkeitsanalyse, über die Risikoeinschätzung, die Einrichtung der digitalen und physischen Infrastruktur, die Inbetriebnahme sowie den täglichen Betriebsablauf bis hin zur Evaluierung“, so Rehrl weiter.
Auf privatem Gelände hat der Digibus® bereits bewiesen, dass ein aus einer Zentrale überwachter, gänzlich fahrerloser Betrieb schon heute technisch möglich ist. Die überwiegende Mehrheit der Testpersonen gab an, dass sie sich im Shuttle sicher gefühlt hat. „Die Hälfte der Testpersonen könnte sich vorstellen, dass in Zukunft ein automatisiertes Shuttle den PKW bzw. Zweit-PKW ersetzt“, sagt Projektleiter Karl Rehrl von Salzburg Research.
Der Betrieb auf öffentlichen Straßen ist jedoch in vielerlei Hinsicht herausfordernd: Die entwickelten Methoden und Technologien wurden auf öffentlichen und nicht-öffentlichen Teststrecken in Salzburg und Niederösterreich erprobt. Hindernisse wurden zuverlässig erkannt und die Fahrt gestoppt. Die Reaktionen der insgesamt rund 3.000 Fahrgäste fielen vorwiegend positiv aus. Dem Großteil der Fahrgäste gefiel die Fahrt im Shuttle und sie fühlten sich sehr sicher oder sicher. Besonders herausfordernd im Pilotbetrieb in der Salzburger Gemeinde Koppl waren die relativ hohen Geschwindigkeiten von anderen Fahrzeugen sowie Abbiegesituatiuationen.
Ergebnisse aus dem Pilotprojekt
Das Leitprojekt Digibus® Austria hat gezeigt, dass für einen sicheren und zuverlässigen Einsatz neben den automatisierten Fahrfunktionen eine Vielzahl von weiteren Herausforderungen gelöst werden muss. Dazu zählen unter anderem die folgenden Punkte:
- Umfeldbedingungen und Wegführung
Bevor ein fahrerloser Shuttlebus überhaupt auf öffentlichen Straßen fahren kann, müssen Umfeld-Bedingungen, Fahrszenarien und mögliche Wegführungen genau geprüft und bewertet werden. Dafür wurden im Leitprojekt Digibus® Austria Methoden zur Risikoanalyse entwickelt und erprobt. Durch eine erweiterte Road Safety Inspection wird das Risiko durch eine Begehung vor Ort beurteilt. Für besonders risikoreiche Fahrsituationen ist eine virtuelle Risikoanalyse anhand einer Simulation nötig. Dazu werden Objekte der Umgebung, wie Fahrstreifen oder Begrenzungsobjekte, digital in einer hochpräzisen Karte abgebildet. Mit Hilfe der hochgenauen Karte gelang es, die exakte Fahrspur des Digibus® automatisiert abzuleiten. Durch die Simulation konnte die Fahrspur weiter optimiert werden, sodass das Unfallrisiko während der Fahrt minimiert wird. So gelang es beispielsweise, die Zeit beim Verlassen eines kritischen Kreuzungsbereichs durch die Optimierung der Fahrspur beinahe zu halbieren. - Positionierung
Damit sich ein automatisiertes Fahrzeug sicher auf der öffentlichen Straße bewegen kann, muss es zu jeder Zeit sehr genau seine eigene Position kennen. Neben den LiDaR-Daten, der Inertialmesseinheit (IMU) und der Odometrie werden dafür GNSS-Satellitensignale eingesetzt, deren Genauigkeit üblicherweise nur im Meterbereich liegt. Durch die Berücksichtigung von Korrekturdaten durch das so genannte Realtime Kinematics-Verfahren kann eine zentimetergenaue Positionsbestimmung gelingen. Dafür müssen die Korrekturdaten in ausgezeichneter Qualität über das vorhandene LTE-Breitbandnetz oder über zusätzliche Kommunikationsinfrastruktur vor Ort dem Fahrzeug bereitgestellt werden. Im Leitprojekt wurde die Teststrecke in Koppl mit sogenannten C-ITS V2X Roadside Units ausgestattet, um die Übertragung der Korrekturdaten über den WLAN-basierten ITS-G5-Standard zu erproben. - Kommunikation mit Fahrgästen und anderen Verkehrsteilnehmer/-innen
Damit ein automatisiertes Fahrzeug tatsächlich alleine mit Fahrgästen fahren kann, muss es sehr klar mit Fahrgästen und seiner Umgebung kommunizieren. Im Leitprojekt Digibus® Austria entstanden neue Methoden und Technologien der Fahrgastinteraktion, die speziell auf die Kommunikations- und Informationsbedürfnisse von Fahrgästen in einem fahrerlosen Shuttle sowie in dessen Umfeld angepasst sind: Dazu gehören die Anzeige von aktuellen Echtzeit-Informationen auf interaktiven Touch-Monitoren im Shuttle und an Haltestellen, ein berührungsloser Sprachassistent, der mit künstlicher Intelligenz zur Klärung oft gestellter Fragen beiträgt sowie die Möglichkeit, im Bedarfsfall per Direktverbindung Hilfe von einer Leitstelle anzufordern.
Die Kommunikation mit anderen Verkehrsteilnehmenden wurde mittels unterschiedlicher LED-Animationen an der Außenseite des Shuttles getestet. Dadurch lässt sich beispielsweise an Fußgänger/-innen effektiv kommunizieren, ob das Fahrzeug vor einem Fußgängerübergang anhält bzw. wann es wieder weiterfährt. - Integration in das regionale Mobilitätssystem
Erstmalig wurde im Leitprojekt Digibus® Austria ein automatisiertes Shuttle auch vollständig in ein regionales Mobilitätssystem integriert und ein öffentlicher Pilotbetrieb nach Fahrplan durchgeführt. Drei Monate lang ergänzte der Digibus® wochentags die bestehende Buslinie in der Gemeinde Koppl und verdichtete diese auf einen Halbstundentakt. Für diesen Pilotbetrieb wurde mit Hilfe der Mobilitäts-App wegfinder die gesamte Mobilitätskette digital abgebildet. Fahrgäste konnten mit der App ihre Fahrt im Digibus® planen und sich über freie Plätze sowie Anschlüsse zur Weiterfahrt informieren. Die Verbindungen des Digibus® inkl. der Echtzeit-Abfahrts- und Ankunftszeiten sowie der aktuellen Sitzplatzauslastungen wurden in der App angezeigt.
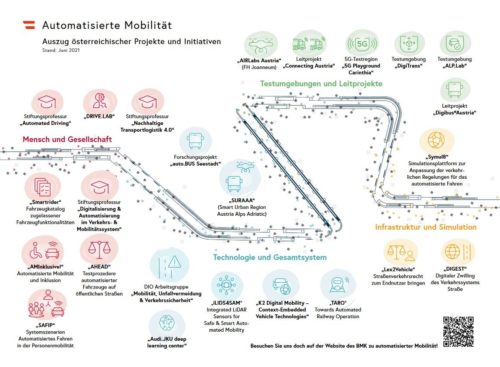
Das Aktionspaket Automatisierte Mobilität
„Automatisierte Mobilität ist ein Teil der Mobilität der Zukunft“, so Michael Nikowitz, Koordinator für Automatisiertes Fahren im BMK. Gemeinsam mit der Elektrifizierung, der gemeinsamen Nutzung und der Vernetzung stellt sie so eine der wichtigen Säulen auf diesem Gebiet. Seit 2016 beschäftigt sich das BMKintensiv mit dieser Thematik. Der unglaublich rasche Technologiefortschritt bedarf hierbei ebenso schneller Reaktionen auch von Seiten der öffentlichen Hand. „Es ist ganz essentiell, dass wir uns mit der Thematik möglichst breit und interdisziplinär beschäftigen, um sicherzustellen, dass wir als Ministerium die richtigen Fragestellungen und Themen adressieren“, so Nikowitz weiter.
Die Austria Tech ist die Kontaktstelle zum Automatisierten Fahren des BMK. Gemeinsam hat man das Aktionspaket Automatisierte Mobilität sowie das Forum Automatisierte Mobilität ins Leben gerufen, einem jährlichen Symposium, welches die Entwicklung automatisierter Mobilität bestmöglich abbilden und als Dialogveranstaltung dienen soll, um von allen Akteuren von der Industrie, über Verwaltung und Wissenschaft bis zu Start-ups sowohl den neuesten Stand zu bekommen als auch kritisches Hinterfragen der Entwicklungen zu ermöglichen, wie Nikowitz betont.
Für ihn ist ein transparenter und objektiver Wissensaustausch unumgänglich, damit im Falle der Automatisierung nicht vergeblich an der Entwicklung von Lösungen gearbeitet und erst im Nachhinein erkannt wird, dass Best-Practice-Beispiele bereits verfügbar gewesen wären.
Neue automatisierte Mobilitäts-Services gelten als eine der Tech-Revolutionen im 21. Jahrhundert, die neben anderen Zweigen fortschreitender Digitalisierung von großem Einfluß auf unseren Alltag sein wird. Entwicklungen auf dem Gebiet der automatisierten Mobilität – seien es Assistenzsysteme in privaten Pkw, sogenannte Robo-Taxis oder fahrerlose öffentliche Verkehrsmittel werden unsere Mobilität und die Möglichkeiten des [Vor]Ankommens in Städten und auch im ländlichen Raum stark verändern.
Aktionspaket Automatisierte Mobilität